297438315@qq.com
181-6871-5955

如今的生产流程不仅要更快,更节省和更灵活,还要同时满足现下大趋势如可持续,资源管理以及定制化的要求






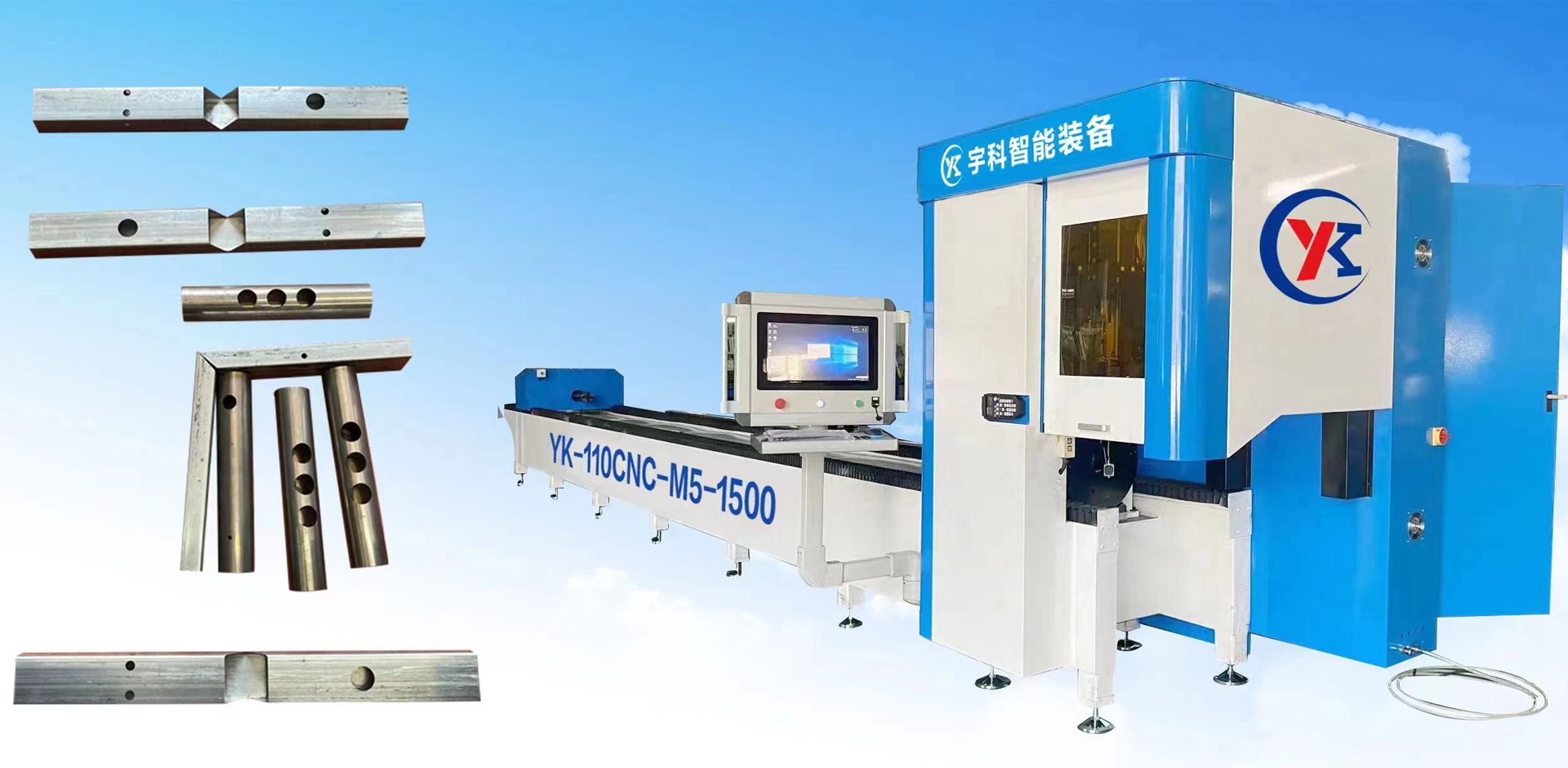
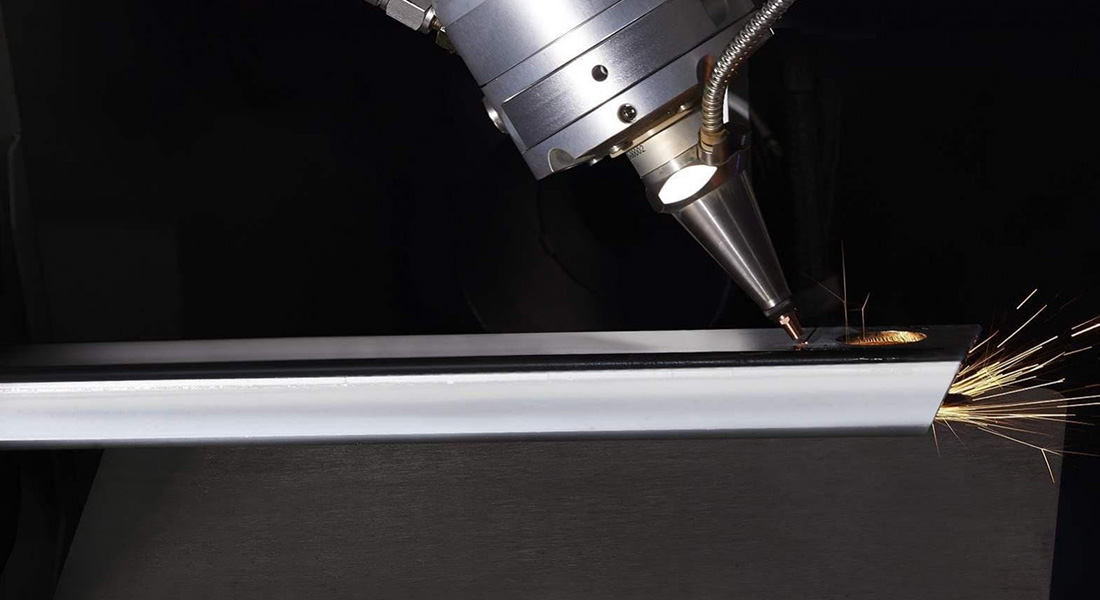
 YK-120CNC-3000W坡口三维激光切管机
YK-120CNC-3000W坡口三维激光切管机 液冷管道全自动拔孔机
液冷管道全自动拔孔机 液冷管道全自动抜孔机
液冷管道全自动抜孔机 液冷管道整形机
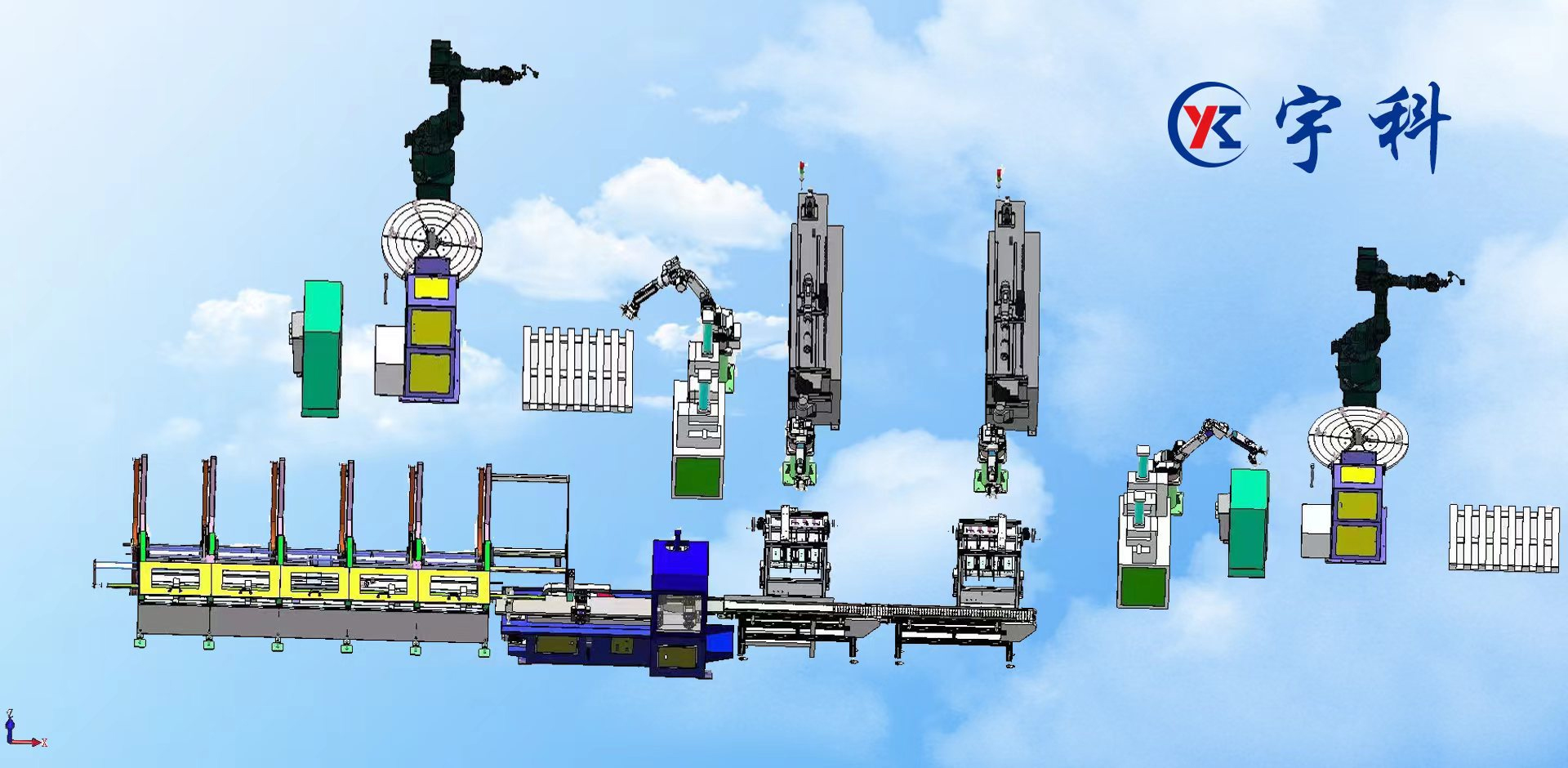
液冷管道整形机 自动上下料弯管生产线
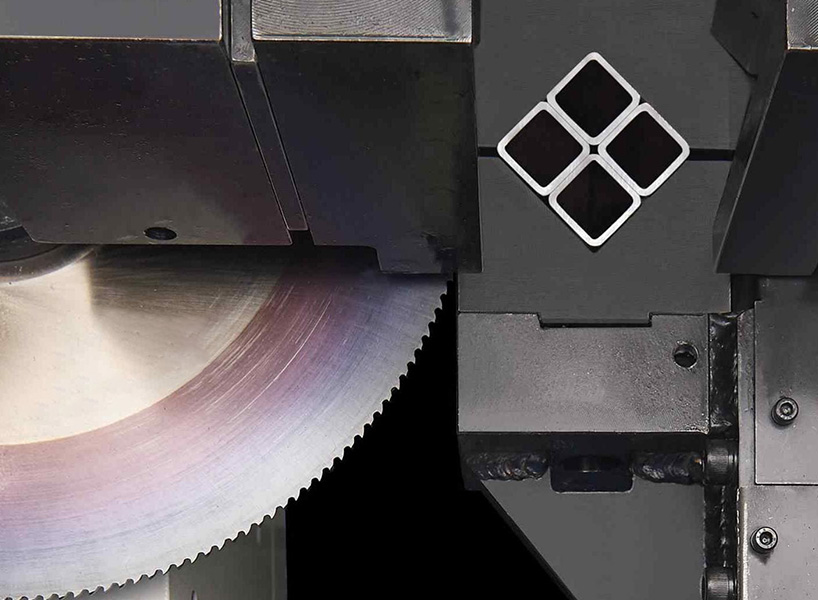
自动上下料弯管生产线 伺服双头倒角机
伺服双头倒角机建立在经验和创新之上的旅程
一管成材自动化解决方案
7年行业制造经验
资深工程师团队10余人
各种生产设备50余台
位于上海百公里经济辐射圈
服务终端客户100家以上



在这里,阅读我们的文章了解我们的动态,并且了解我们的新产品。
为了更好地满足您的需求,请指明您的业务领域、原材料的种类以及其它有助于我们优化方案的信息。